@article{Cai2023b,
title = {Brain organoid reservoir computing for artificial intelligence},
author = {Hongwei Cai and Zheng Ao and Chunhui Tian and Zhuhao Wu and Hongcheng Liu and Jason Tchieu and Mingxia Gu and Ken Mackie and Feng Guo },
url = {https://www.nature.com/articles/s41928-023-01069-w},
doi = {10.1038/s41928-023-01069-w},
year = {2023},
date = {2023-12-11},
journal = {Nature Electronics},
abstract = {Brain-inspired computing hardware aims to emulate the structure and working principles of the brain and could be used to address current limitations in artificial intelligence technologies. However, brain-inspired silicon chips are still limited in their ability to fully mimic brain function as most examples are built on digital electronic principles. Here we report an artificial intelligence hardware approach that uses adaptive reservoir computation of biological neural networks in a brain organoid. In this approach—which is termed Brainoware—computation is performed by sending and receiving information from the brain organoid using a high-density multielectrode array. By applying spatiotemporal electrical stimulation, nonlinear dynamics and fading memory properties are achieved, as well as unsupervised learning from training data by reshaping the organoid functional connectivity. We illustrate the practical potential of this technique by using it for speech recognition and nonlinear equation prediction in a reservoir computing framework.},
keywords = {3D Culture, HD-MEA, Machine Learning, MaxOne, MEA Technology, Organoids, Stimulation},
pubstate = {published},
tppubtype = {article}
}
Brain-inspired computing hardware aims to emulate the structure and working principles of the brain and could be used to address current limitations in artificial intelligence technologies. However, brain-inspired silicon chips are still limited in their ability to fully mimic brain function as most examples are built on digital electronic principles. Here we report an artificial intelligence hardware approach that uses adaptive reservoir computation of biological neural networks in a brain organoid. In this approach—which is termed Brainoware—computation is performed by sending and receiving information from the brain organoid using a high-density multielectrode array. By applying spatiotemporal electrical stimulation, nonlinear dynamics and fading memory properties are achieved, as well as unsupervised learning from training data by reshaping the organoid functional connectivity. We illustrate the practical potential of this technique by using it for speech recognition and nonlinear equation prediction in a reservoir computing framework.
@article{Cai2023,
title = {Brain Organoid Computing for Artificial Intelligence},
author = {Hongwei Cai and Zheng Ao and Chunhui Tian and Zhuhao Wu and Hongcheng Liu and Jason Tchieu and Mingxia Gu and Ken Mackie and and Feng Guo},
url = {https://www.biorxiv.org/content/10.1101/2023.02.28.530502v1},
doi = {10.1101/2023.02.28.530502},
year = {2023},
date = {2023-03-01},
journal = {bioRxiv},
abstract = {Brain-inspired hardware emulates the structure and working principles of a biological brain and may address the hardware bottleneck for fast-growing artificial intelligence (AI). Current brain-inspired silicon chips are promising but still limit their power to fully mimic brain function for AI computing. Here, we develop Brainoware, living AI hardware that harnesses the computation power of 3D biological neural networks in a brain organoid. Brain-like 3D in vitro cultures compute by receiving and sending information via a multielectrode array. Applying spatiotemporal electrical stimulation, this approach not only exhibits nonlinear dynamics and fading memory properties but also learns from training data. Further experiments demonstrate real-world applications in solving non-linear equations. This approach may provide new insights into AI hardware.
},
keywords = {HD-MEA, Machine Learning, MaxOne, MEA Technology, Modeling, Organoids, Stimulation},
pubstate = {published},
tppubtype = {article}
}
Brain-inspired hardware emulates the structure and working principles of a biological brain and may address the hardware bottleneck for fast-growing artificial intelligence (AI). Current brain-inspired silicon chips are promising but still limit their power to fully mimic brain function for AI computing. Here, we develop Brainoware, living AI hardware that harnesses the computation power of 3D biological neural networks in a brain organoid. Brain-like 3D in vitro cultures compute by receiving and sending information via a multielectrode array. Applying spatiotemporal electrical stimulation, this approach not only exhibits nonlinear dynamics and fading memory properties but also learns from training data. Further experiments demonstrate real-world applications in solving non-linear equations. This approach may provide new insights into AI hardware.
@conference{Habibollahi2022,
title = {Biological Neurons vs Deep Reinforcement Learning: Sample efficiency in a simulated game-world },
author = {Forough Habibollahi and Moein Khajehnejad and Amitesh Gaurav and Brett Joseph Kagan},
url = {https://openreview.net/forum?id=N5qLXpc7HQy},
year = {2022},
date = {2022-11-28},
journal = {OpenReview.net},
abstract = {How do synthetic biological systems and artificial neural networks compete in their performance in a game environment? Reinforcement learning has undergone significant advances, however remains behind biological neural intelligence in terms of sample efficiency. Yet most biological systems are significantly more complicated than most algorithms. Here we compare the inherent intelligence of in vitro biological neuronal networks to state-of-the-art deep reinforcement learning algorithms in the arcade game 'pong'. We employed DishBrain, a system that embodies in vitro neural networks with in silico computation using a high-density multielectrode array. We compared the learning curve and the performance of these biological systems against time-matched learning from DQN, A2C, and PPO algorithms. Agents were implemented in a reward-based environment of the `Pong' game. Key learning characteristics of the deep reinforcement learning agents were tested with those of the biological neuronal cultures in the same game environment. We find that even these very simple biological cultures typically outperform deep reinforcement learning systems in terms of various game performance characteristics, such as the average rally length implying a higher sample efficiency. Furthermore, the human cell cultures proved to have the overall highest relative improvement in the average number of hits in a rally when comparing the initial 5 minutes and the last 15 minutes of each designed gameplay session. },
keywords = {Machine Learning, MaxOne},
pubstate = {published},
tppubtype = {conference}
}
How do synthetic biological systems and artificial neural networks compete in their performance in a game environment? Reinforcement learning has undergone significant advances, however remains behind biological neural intelligence in terms of sample efficiency. Yet most biological systems are significantly more complicated than most algorithms. Here we compare the inherent intelligence of in vitro biological neuronal networks to state-of-the-art deep reinforcement learning algorithms in the arcade game 'pong'. We employed DishBrain, a system that embodies in vitro neural networks with in silico computation using a high-density multielectrode array. We compared the learning curve and the performance of these biological systems against time-matched learning from DQN, A2C, and PPO algorithms. Agents were implemented in a reward-based environment of the `Pong' game. Key learning characteristics of the deep reinforcement learning agents were tested with those of the biological neuronal cultures in the same game environment. We find that even these very simple biological cultures typically outperform deep reinforcement learning systems in terms of various game performance characteristics, such as the average rally length implying a higher sample efficiency. Furthermore, the human cell cultures proved to have the overall highest relative improvement in the average number of hits in a rally when comparing the initial 5 minutes and the last 15 minutes of each designed gameplay session.
@article{Sawada2022,
title = {Design strategies for controlling neuron-connected robots using reinforcement learning},
author = {Haruto Sawada and Naoki Wake and Kazuhiro Sasabuchi and Jun Takamatsu and Hirokazu Takahashi and Katsushi Ikeuchi},
url = {https://arxiv.org/abs/2203.15290},
doi = {https://doi.org/10.48550/arXiv.2203.15290},
year = {2022},
date = {2022-03-29},
journal = {arXiv},
abstract = {Despite the growing interest in robot control utilizing the computation of biological neurons, context-dependent behavior by neuron-connected robots remains a challenge. Context-dependent behavior here is defined as behavior that is not the result of a simple sensory-motor coupling, but rather based on an understanding of the task goal. This paper proposes design principles for training neuron-connected robots based on task goals to achieve context-dependent behavior. First, we employ deep reinforcement learning (RL) to enable training that accounts for goal achievements. Second, we propose a neuron simulator as a probability distribution based on recorded neural data, aiming to represent physiologically valid neural dynamics while avoiding complex modeling with high computational costs. Furthermore, we propose to update the simulators during the training to bridge the gap between the simulation and the real settings. The experiments showed that the robot gradually learned context-dependent behaviors in pole balancing and robot navigation tasks. Moreover, the learned policies were valid for neural simulators based on novel neural data, and the task performance increased by updating the simulators during training. These results suggest the effectiveness of the proposed design principle for the context-dependent behavior of neuron-connected robots.},
keywords = {Machine Learning, MaxOne, Stimulation},
pubstate = {published},
tppubtype = {article}
}
Despite the growing interest in robot control utilizing the computation of biological neurons, context-dependent behavior by neuron-connected robots remains a challenge. Context-dependent behavior here is defined as behavior that is not the result of a simple sensory-motor coupling, but rather based on an understanding of the task goal. This paper proposes design principles for training neuron-connected robots based on task goals to achieve context-dependent behavior. First, we employ deep reinforcement learning (RL) to enable training that accounts for goal achievements. Second, we propose a neuron simulator as a probability distribution based on recorded neural data, aiming to represent physiologically valid neural dynamics while avoiding complex modeling with high computational costs. Furthermore, we propose to update the simulators during the training to bridge the gap between the simulation and the real settings. The experiments showed that the robot gradually learned context-dependent behaviors in pole balancing and robot navigation tasks. Moreover, the learned policies were valid for neural simulators based on novel neural data, and the task performance increased by updating the simulators during training. These results suggest the effectiveness of the proposed design principle for the context-dependent behavior of neuron-connected robots.
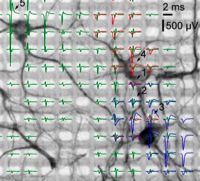
Presenting measurements of neuronal preparations with a novel CMOS-based microelectrode array at high-spatiotemporal-resolution on subcellular, cellular, and network level.
J. Müller, M. Ballini, P. Livi, Y. Chen, M. Radivojevic, A. Shadmani, V. Viswam, I. L. Jones, M. Fiscella, R. Diggelmann, A. Stettler, U. Frey, D. J. Bakkum, and A. Hierlemann, “High-resolution CMOS MEA platform to study neurons at subcellular, cellular, and network levels,” Lab Chip, vol. 15, no. 13, pp. 2767–2780, May 2015.
Reviewing the current understanding of microelectrode signals and the techniques for analyzing them, with focus on the ongoing advancements in microelectrode technology (in vivo and in vitro) and recent advanced microelectrode array measurement methods that facilitate the understanding of single neurons and network function.
M. E. J. Obien, K. Deligkaris, T. Bullmann, D. J. Bakkum, and U. Frey, “Revealing Neuronal Function through Microelectrode Array Recordings,” Front. Neurosci., 8:423, Jan 2015.
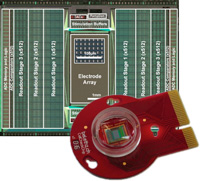
A high-resolution CMOS-based microelectrode array featuring 1,024 low-noise readout channels, 26,400 electrodes at a density of 3,265 electrodes per mm2, including on-chip 10bit ADCs and consuming only 75 mW.
M. Ballini, J. Muller, P. Livi, Y. Chen, U. Frey, A. Stettler, A. Shadmani, V. Viswam, I. L. Jones, D. Jackel, M. Radivojevic, M. K. Lewandowska, W. Gong, M. Fiscella, D. J. Bakkum, F. Heer, and A. Hierlemann, “A 1024-Channel CMOS Microelectrode Array With 26,400 Electrodes for Recording and Stimulation of Electrogenic Cells In Vitro,” IEEE Journal of Solid-State Circuits, vol. 49, no. 11, pp. 2705-2719, 2014.
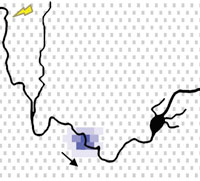
Demonstrating a method to electrically visualize action potential propagation on axons and revealing
large variations in velocity.
D. J. Bakkum, U. Frey, M. Radivojevic, T. L. Russell, J. Muller, M. Fiscella, H. Takahashi, and A. Hierlemann, “Tracking axonal action potential propagation on a high-density microelectrode array across hundreds of sites,” Nature Communications, 4:2181, Jul 2013.
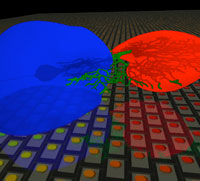
Recording and modeling extracellular action potentials of Purkinje cells at subcellular resolution.
U. Frey, U. Egert, F. Heer, S. Hafizovic, and A. Hierlemann, “Microelectronic System for High-Resolution Mapping of Extracellular Electric Fields Applied to Brain Slices,” Biosensors and Bioelectronics, vol. 24, no. 7, pp. 2191-2198, 2009.
Controlling BMP-2 expression to modulate the electrophysiological properties of cardiomyocytes using an HD-MEA for detailed monitoring.
C. D. Sanchez-Bustamante, U. Frey, J. M. Kelm, A. Hierlemann, and M. Fussenegger,
“Modulation of Cardiomyocyte Electrical Properties Using Regulated Bone Morphogenetic Protein-2 Expression,” Tissue Engineering Part A, vol. 14, no. 12, pp. 1969-1988, 2008.
Want to learn more? Schedule a call with one of our application scientists:
We use cookies on our website to give you the most relevant experience by remembering your preferences and repeat visits. By clicking “Accept”, you consent to the use of ALL the cookies. Read more about our Privacy Policy
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. These cookies ensure basic functionalities and security features of the website, anonymously.
Cookie
Duration
Description
cookielawinfo-checbox-analytics
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Analytics".
cookielawinfo-checbox-functional
11 months
The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Functional".
cookielawinfo-checbox-others
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Other.
cookielawinfo-checkbox-necessary
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Necessary".
cookielawinfo-checkbox-performance
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Performance".
viewed_cookie_policy
11 months
The cookie is set by the GDPR Cookie Consent plugin and is used to store whether or not user has consented to the use of cookies. It does not store any personal data.
Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features.
Performance cookies are used to understand and analyze the key performance indexes of the website which helps in delivering a better user experience for the visitors.
Analytical cookies are used to understand how visitors interact with the website. These cookies help provide information on metrics the number of visitors, bounce rate, traffic source, etc.
Advertisement cookies are used to provide visitors with relevant ads and marketing campaigns. These cookies track visitors across websites and collect information to provide customized ads.
 English
English 繁體中文
繁體中文 简体中文
简体中文 日本語
日本語